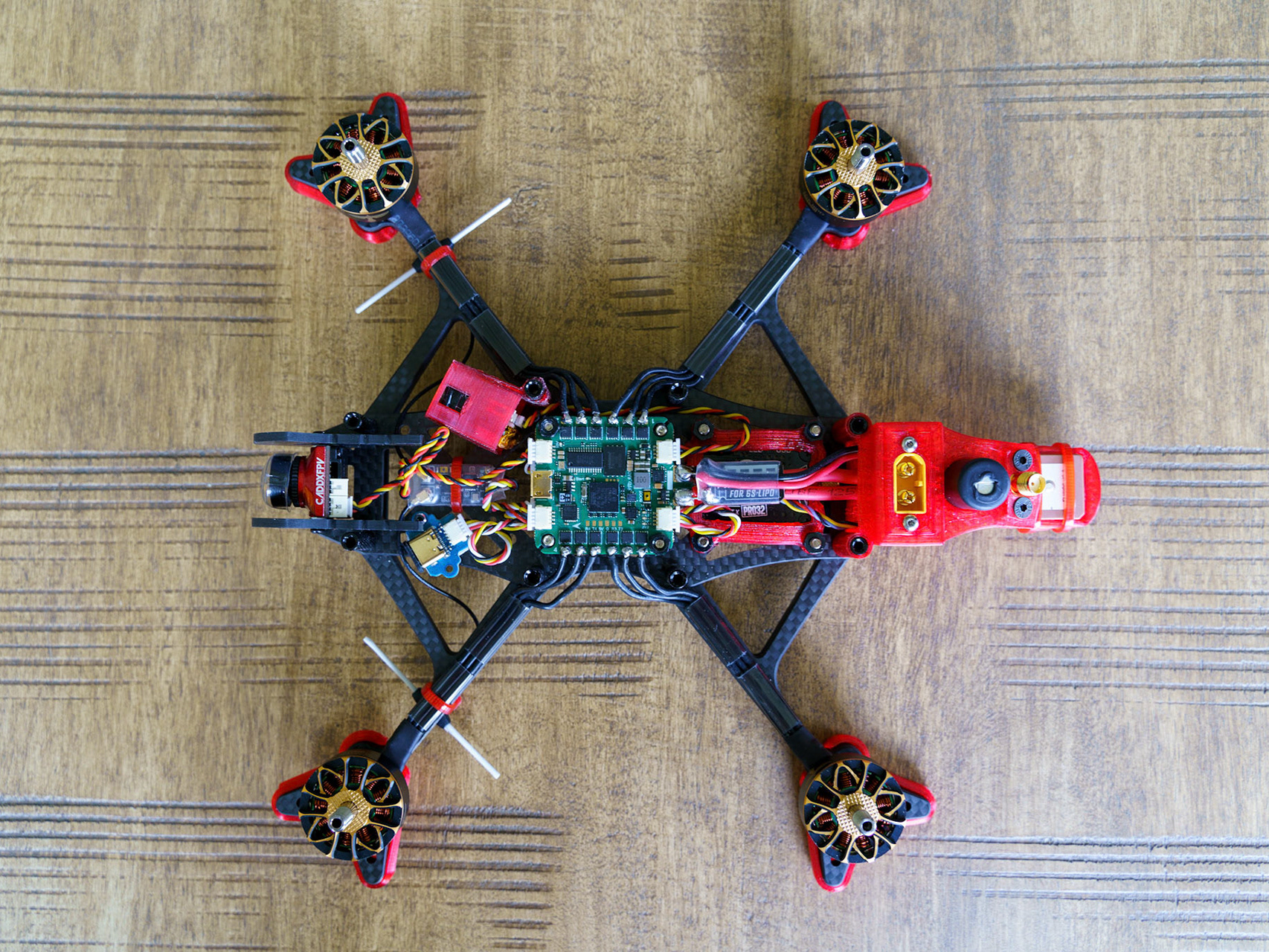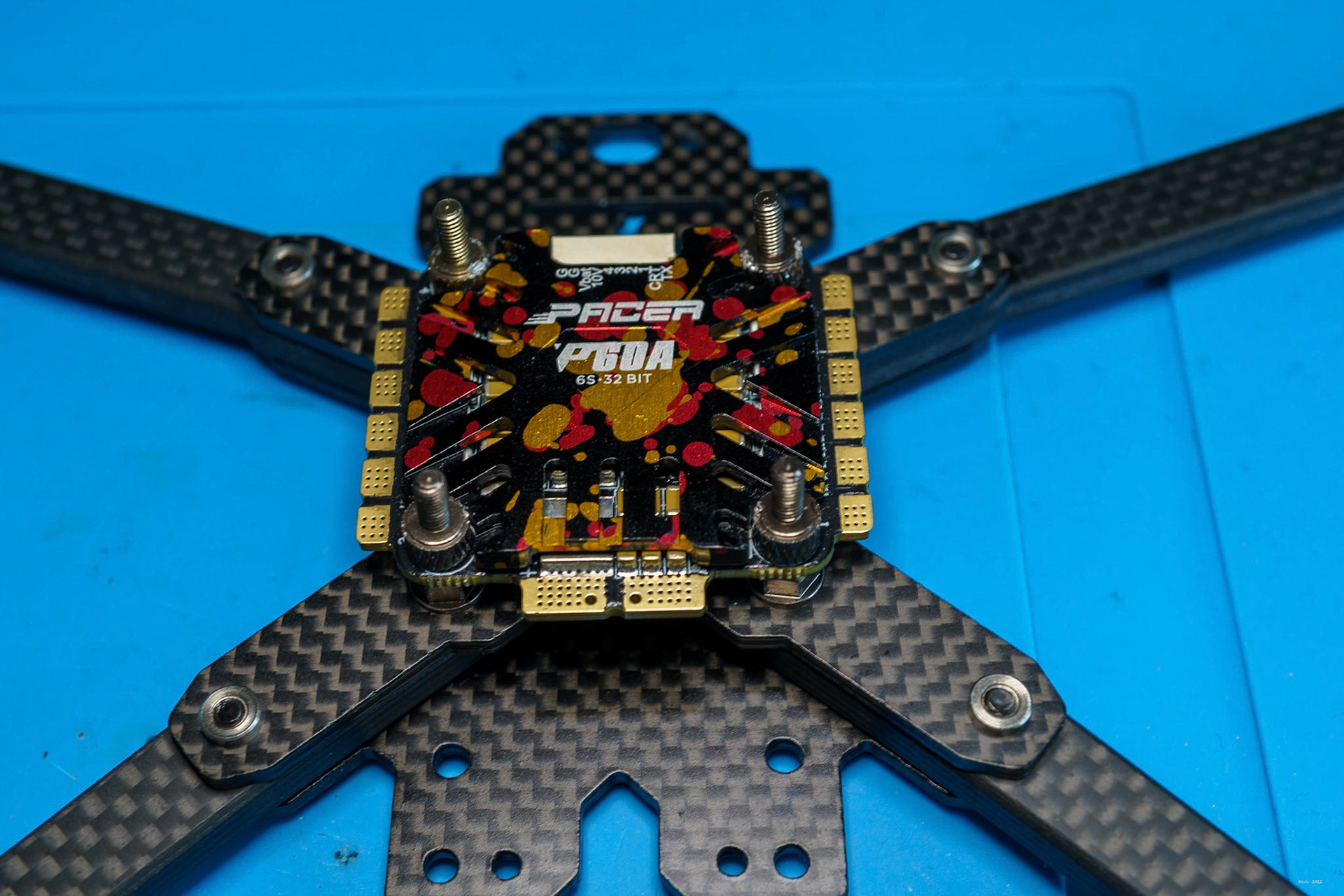
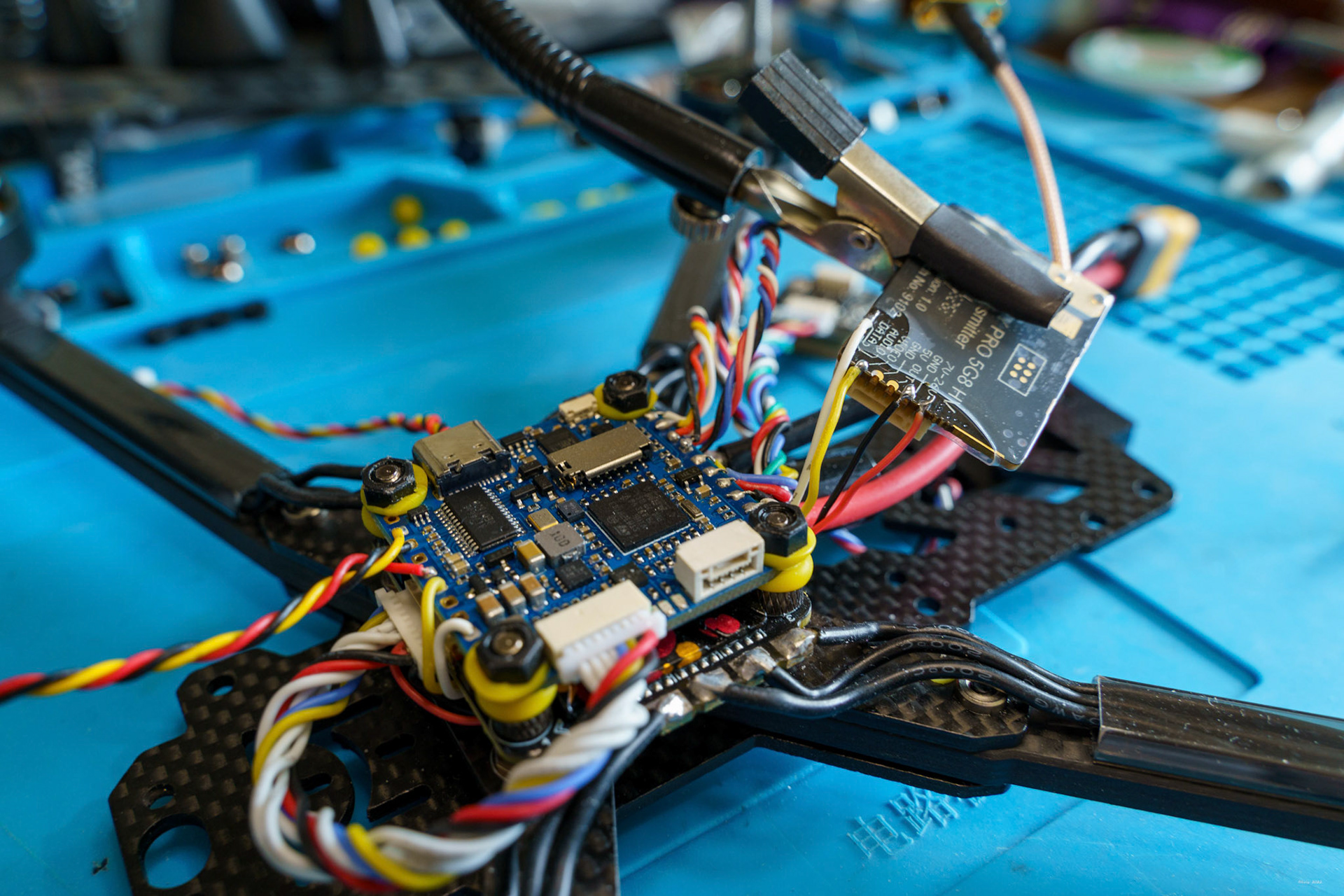
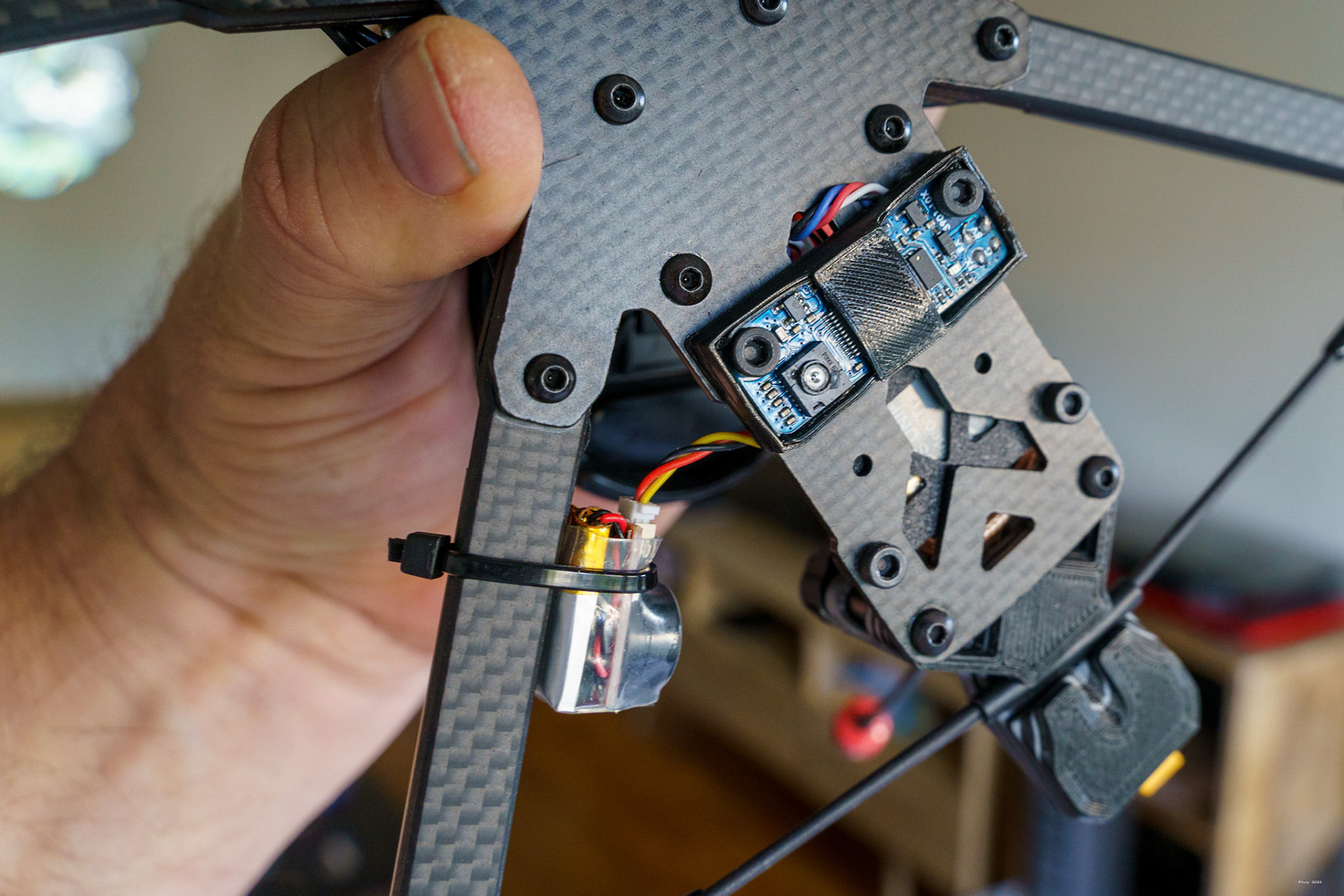






The Build The construction is not a particular problem. I chose T-Motor Pacer 60A esc so that I could put on it more violent motors than the F90 1500Kv if I wanted to. For the CF, I chose a Matek H743 Slim: not because I'm a fan of the brand, it's the first one for me, but because I want to be able to test in the future "stabilized" systems (Inav, ArduCopter...) which could be more suitable for this kind of cinematic use: you don't do too many tricks with a 38 tons and you like it if it can go home by itself. Besides, I've recently become a professional telepilot, and I'd like to have one day a fpv machine a bit more in accordance with the legislation (distance and flight height limiters, rth, etc.). Besides, the first problem is the weight: the build comes out at 555g empty, 755g with a Tattu 6S and 912g with a GP9 on it. So I'll have to add a remote identification tag (12g) after the "empty" tests because the machine is undeniably over 800g "ready to shoot". Or buy a 4K SMO, but the quality of the images of the GP is now above the lot and the "bones" version is only available in the US. So I'm going to design a mount for my little Caddix and stay under 800g for testing, shooting in 2.7k. Also, I added a Matek optical sensor under the machine in anticipation of testing other systems - with BF it's useless (and not usable) I had to design and print an fpv cam mount that clips and fits on the original mount, the latter being designed for a DJI camera: I stayed in analog, with quality gear it does it enough for me. I'm waiting to have alternative choices to go digital. The support file is here: https://www.thingiverse.com/thing:5216175 Regarding the Matek H743 Slim, no particular problem : but if you don't like micro-soldering, go away ! This is my third build, having started with a small 3", so no problem, but I don't recommend it to the "big beginner" anyway. All sensors are present: accelerometer, barometer, magnetometer on the board, gps and external optical sensor of the same brand. I had to redo the wiring to the esc, the Pacer 60 does not have the same wiring as the Matek. I take directly the current (10v) from the vtx HV on the esc via the cables provided for this purpose. The software For the esc I use BHeli32 (32.9): the variable frequency according to the motor revolutions (PWM Freq) makes the F90 very linear at least in the test graph. I fly with the same configuration on my 5" and it's really nice, very linear from low to high throttle... I haven't tested with the big engines yet, but I reproduce what I like. For the FC, I'm using Betalight 4.3 with the default pid : I'm going to make some blackboxes and adjust everything, but I haven't flown yet. Since I know a little bit about the thing, I'm going to start with what I know for the first tests. Then I think I'll test INAV or even ArduCopter since some people have done it with the same FC. The flight Hum. To be honnest, I've never managed to have it flying correctly. I've vibrations issues... Maybe the 6" arms, but I have to do more tuning to make it fly like a bird... WEIGHT : 555 grams